Fata de ceasul prezentat in prima parte, am mai facut mici modificari, in primul rand am testat cum sa fac reglajul intensitatii, deoarece pe timp de noapte e deranjanta intensitatea maxima a culorilor.
- test control intensitate la afisaj led P3 64x64 cu ESP32
- test for control the brightness at P3 64x64 led display
apoi am adaugat o fotorezistenta intr-un circuit de divizor rezisitv ca in articolul ESP32 - light sensor
si programul meu de test a fost Analog_Clock_NTP_P3_BMZ_1b.ino, in care am pastrat conectarea divizorului rezistiv de la 3.3V la pinulGPIO 36 (adica ADCO0):
adica alimentare de la 3,3V a fotorezistentei, conectare la pinul 36 (GPIO36), apoi rezistenta de 10kΩ la masa (GND).
Cele 2 filmulete de test sunt:
apoi am realizat ca limba de ora este ascunsa de cea de minute, asa ca am modificat programul, ca limba de secunde sa fie afisata prima, apoi cea de minute si peste cea de ore;


programul modificat devine Analog_Clock_NTP_P3_BMZ_1c.ino.
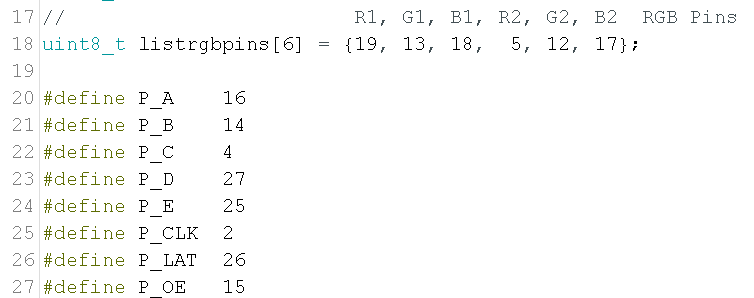
Am vrut sa implementez reglajul orei de vara/iarna de pe o pagina locala web, ca la alte ceasuri, dar am avut ceva dificultati, asa ca din lipsa de timp, am implementat reglajul cu ajutorul unui comutator,care muta pinul 23 la +3.3V pentru ora vara (DST)

-\respectiv la masa (GND) la ora iarna


Programul modifcat este Analog_Clock_NTP_P3_BMZ_1d.ino si filmuletele, care arata modul de functionare sunt: