Dintre multele articole si materiale, m-am oprit la https://circuitdigest.com/microcontroller-projects/arduino-based-self-balancing-robot

si am testat programul, pentru a vedea macar ca se compileaza. Elementul de baza este senzorul MPU6050 care este un accelerometru cu giroscop.
Trecand de pasul asta, am facut un montaj de test pe un breadboard dupa schema

doar ca am pus doar leduri cu rezistente de 220Ω, pentru limitare curent.

incarcand programul, am constatat ca in functie de inclinare, s-ar comanda rotirea controlata a motoarelor, pentru compensarea pozitiei verticale:


Am facut 2 filmulete:
Am mai studiat diverse materiale si am realizat ca trebuie sa fac o "calibrare" a senzorului folosind programul MPU6050_calibration.ino si sa le introduc in programul robotelului:


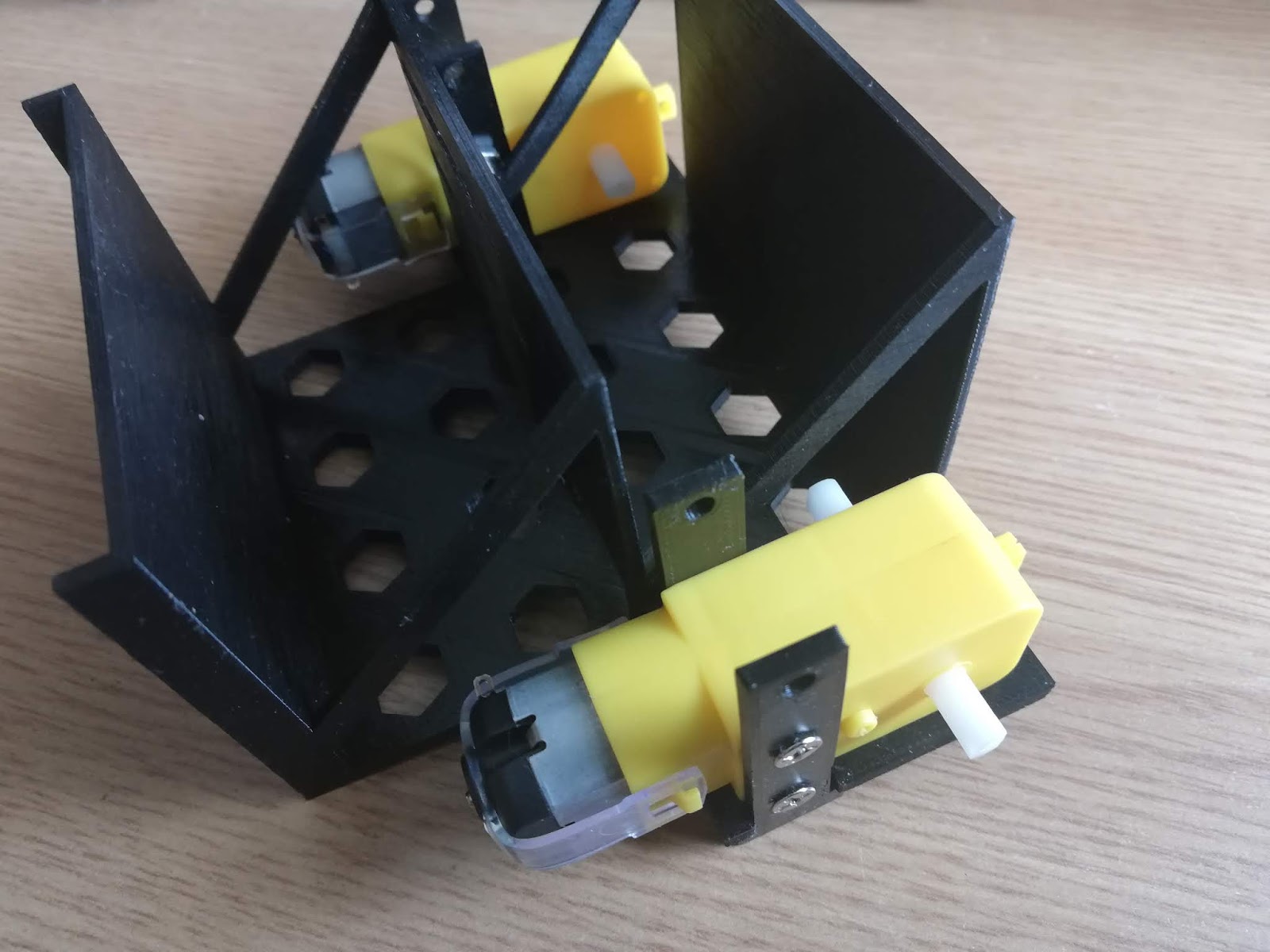
Am facut mici modificari la suportii motoarelor, deoarece design-ul original nu e cel optim:







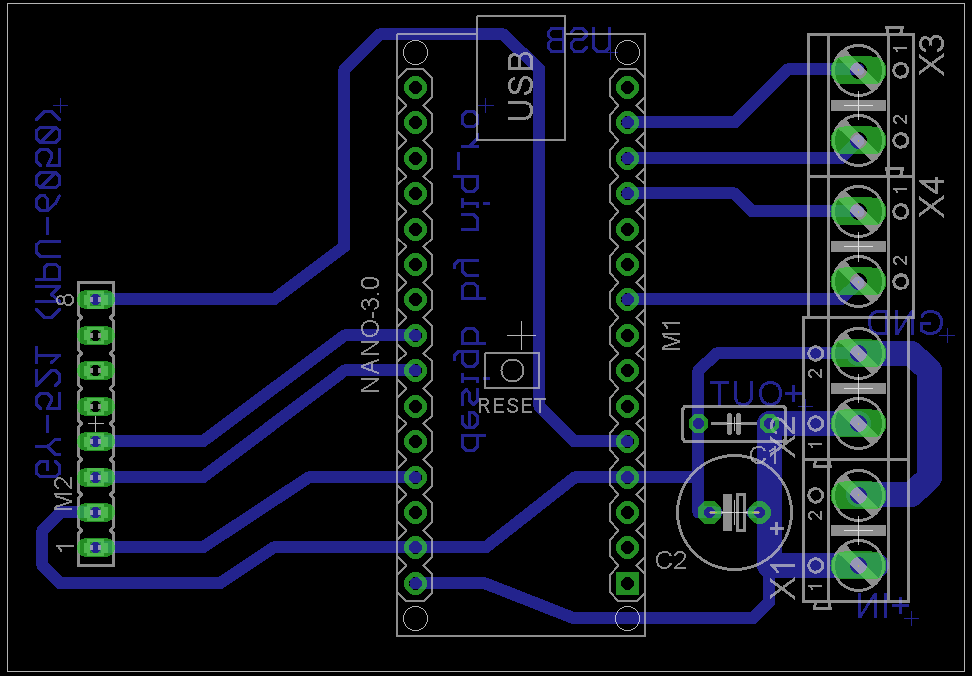
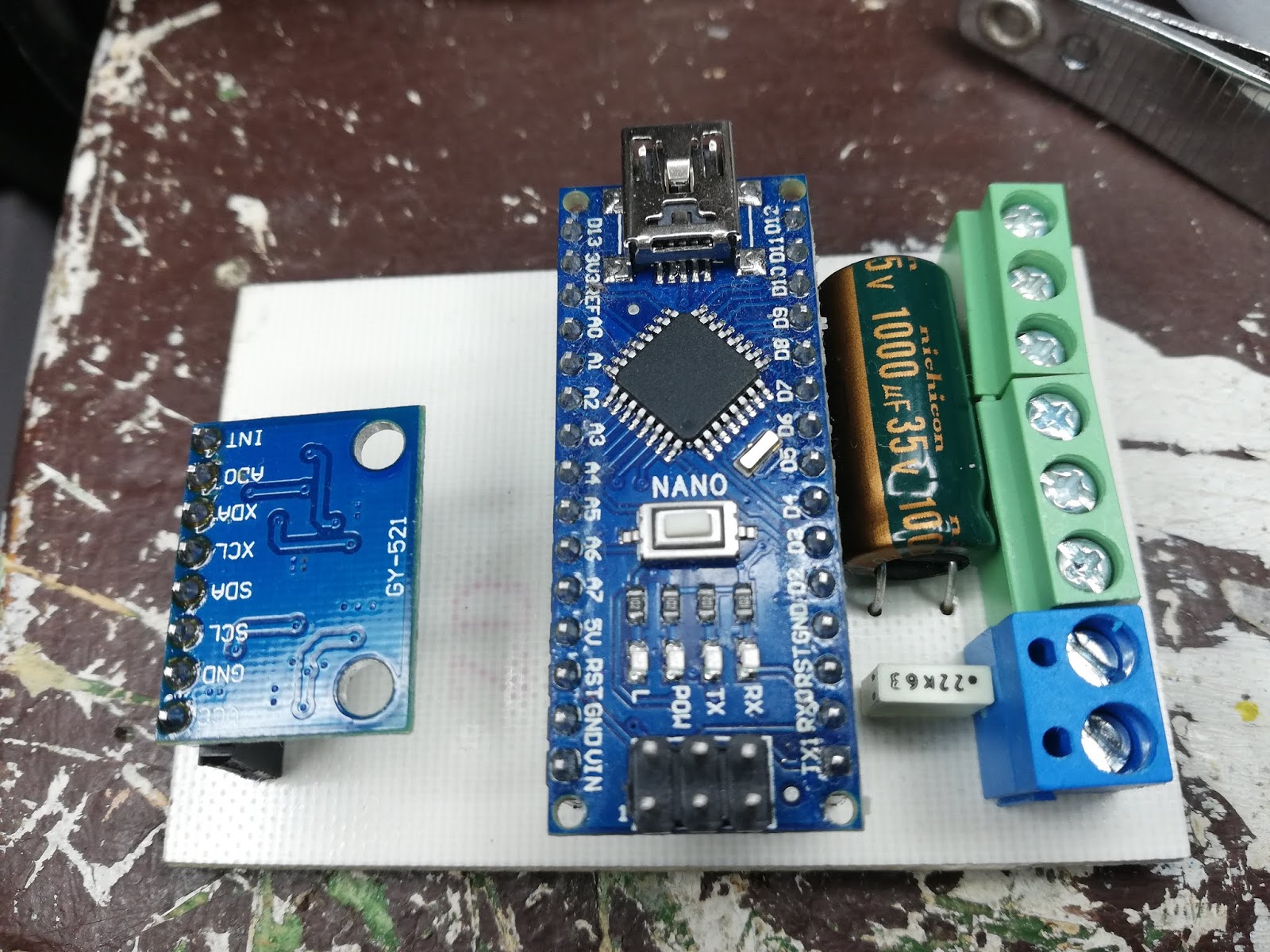
Intre timp, am primit de la prietenul meu Tom, mai multe cablaje, dintre care si unul pentru robotel, pe care il proiectasem in Eagle PCB software:


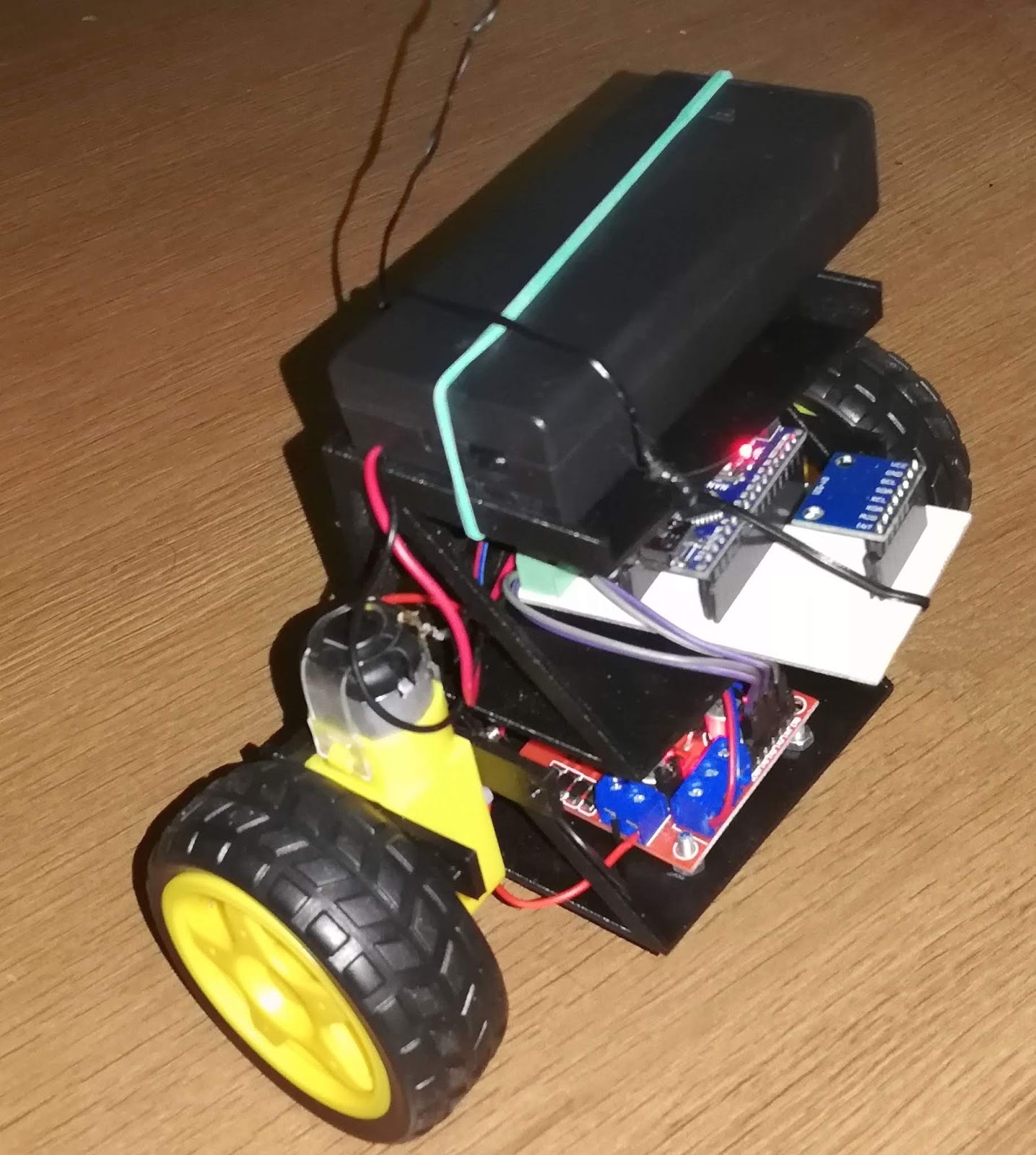
Am fixat si montajul cu Arduino si sistemul de alimentare cu 2 acumulatori 16850 cu BMS 2S:



De exemplu, in articol parametrii erau

- DIY Self Balancing Robot using Arduino



Niciun comentariu:
Trimiteți un comentariu