O aplicatie de efect este aceea in care se comanda un motor, un ventilator, un proiector, o usa de acces prin introducerea unor cifre sau cuvinte de la tastatura calculatorului. Aceasta se poate baza pe comanda Serial.read() a limbajului placii de dezvoltare Arduino. Pe net se gasesc cateva articole despre acest tip de comanda, din care amintesc: - USING ARDUINO TO CONTROL A LED USING THE SERIAL PORT
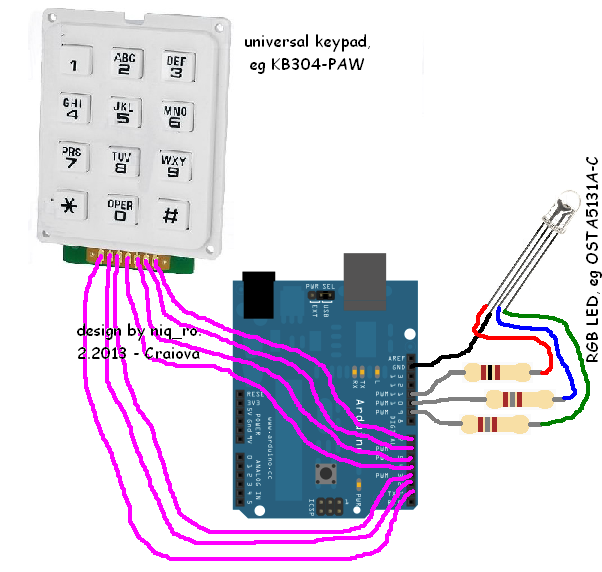
In prezentul articol o sa prezint un modul de acces cu parola, cu inchidere manuala sau temporizata, in care elementul de executie e un servomotor. Acest articol se bazeaza pe informatiile, schemele si programioarele (sketch-urile) din articolele anterioare: - Arduino si o tastatura cu 12 butoane - Arduino si o tastatura cu 12 butoane (II) - Arduino si un servomotor In prima faza am conectat tastatura, afisajul si servomotorul:
// original schematic and schetch from http://www.arduinoevilgenius.com/// adapted schematic by niq_ro ( http://www.tehnic.go.ro/ )// sketch door lock ver.4.0 (19.11.2013) use sketch door lock ver.2.0 (02.03.2013)
#include <EEPROM.h>
char* secretCode = "2255";
intposition = 0;
int position2 = 0;
boolean locked = true;
constbyte rows = 4;
constbyte cols = 3;
char keys[rows][cols] = {
{'1','2','3'},
{'4','5','6'},
{'7','8','9'},
{'*','0','#'}
};
byte rowPins[rows] = {2, 7, 6, 4};
byte colPins[cols] = {3, 1, 5};
Keypadkeypad = Keypad(makeKeymap(keys), rowPins, colPins, rows, cols);
int redPin = 11;
int greenPin = 9;
int bluePin = 10;
int solenoidPin = 13;
// include the library code:
#include <LiquidCrystal.h>
// initialize the library with the numbers of the interface pinsLiquidCrystal lcd(14, 15, 16, 17, 18, 19);
/*---------------------| Arduino | LCD1602 |---------------------| D14(A0) | RS |---------------------| D15(A1) | E |---------------------| D16(A2) | D4 |---------------------| D14(A3) | D5 |---------------------| D14(A4) | D6 |---------------------| D14(A5) | D7 |---------------------*/
#include <Servo.h>
Servo servoMain; // Define our Servovoidsetup()
{
/*pinMode(redPin, OUTPUT);pinMode(greenPin, OUTPUT);pinMode(bluePin, OUTPUT);*///pinMode(9, OUTPUT);
servoMain.attach(9); // servo on digital pin 9//servoMain.write(0); // Turn Servo Left to 0 degrees
lcd.begin(16, 2);
// print my logo
lcd.setCursor(0, 0);
lcd.print("www.tehnic.go.ro");
lcd.setCursor(0, 1);
lcd.print(" by niq_ro");
delay(5000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("acces permis la");
lcd.setCursor(2, 1);
lcd.print("introducere");
delay(1000);
lcd.clear();
lcd.setCursor(2, 0);
lcd.print("parola corecta");
lcd.setCursor(2, 1);
lcd.print("versiune 4 .0");
delay(1000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("apasa tasta '#'");
lcd.setCursor(0, 1);
lcd.print("pentru stergere");
delay(5000);
lcd.clear();
//eraseCode(); // a first test for initial code at "2255";delay(1000);
loadCode(); // load the code from EEPROM
flash();
updateOutputs();
// print a new message
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("introdu parola");
lcd.setCursor(0, 1);
}
voidloop()
{
//servoMain.write(0); // Turn Servo Left to 0 degreeschar key = keypad.getKey();
if (key)
{
position2 ++;
//digitalWrite(bluePin, HIGH);delay(30);
//digitalWrite(bluePin, LOW);
lcd.print("?");
}
if (key == '*' && ! locked)
{
// unlocked and * pressed so change codeposition = 0;
position2 = 0;
getNewCode();
updateOutputs();
}
if (key == '#')
{
locked = true;
position = 0;
position2= 0;
updateOutputs();
//digitalWrite(bluePin, HIGH);//delay(300);//digitalWrite(bluePin, LOW);
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("yala incuiata");
lcd.setCursor(0, 1);
delay(1000);
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("introdu parola");
lcd.setCursor(0, 1);
//lcd.clear();
}
if (key == secretCode[position])
{
position ++;
}
if (position == 4 & position2 == 4)
{
locked = false;
//digitalWrite(bluePin, HIGH);delay(300);
//digitalWrite(bluePin, LOW);
updateOutputs();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("parola corecta..");
lcd.setCursor(2, 1);
lcd.print("acces permis");
}
delay(100);
}
void updateOutputs()
{
if (locked)
{
//digitalWrite(redPin, HIGH);//digitalWrite(greenPin, LOW);digitalWrite(solenoidPin, HIGH);
servoMain.write(90); // Turn Servo back to center position (90 degrees)
}
else
{
//digitalWrite(redPin, LOW);//digitalWrite(greenPin, HIGH);digitalWrite(solenoidPin, LOW);
servoMain.write(0); // Turn Servo Left to 0 degrees
}
}
void getNewCode()
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("parola noua este");
lcd.setCursor(6, 1);
lcd.print("");
flash();
for (int i = 0; i < 4; i++ )
{
char key;
key = keypad.getKey();
while (key == 0)
{
key = keypad.getKey();
}
flash();
secretCode[i] = key;
lcd.print(key);
}
saveCode();
flash();flash();
}
void loadCode()
{
if (EEPROM.read(0) == 7)
{
secretCode[0] = EEPROM.read(1);
secretCode[1] = EEPROM.read(2);
secretCode[2] = EEPROM.read(3);
secretCode[3] = EEPROM.read(4);
}
}
void saveCode()
{
EEPROM.write(1, secretCode[0]);
EEPROM.write(2, secretCode[1]);
EEPROM.write(3, secretCode[2]);
EEPROM.write(4, secretCode[3]);
EEPROM.write(0, 7);
}
void eraseCode() // code is "2255"
{
EEPROM.write(1, 2);
EEPROM.write(2, 2);
EEPROM.write(3, 5);
EEPROM.write(4, 5);
EEPROM.write(0, 2);
}
void flash()
{
/*digitalWrite(redPin, HIGH);digitalWrite(greenPin, LOW);delay(100);digitalWrite(redPin, LOW);digitalWrite(greenPin, HIGH);*/delay(100);
}
Sketch-ul pentru a 2-a versiune este:
// original schematic and schetch from http://www.arduinoevilgenius.com/// adapted schematic by niq_ro ( http://www.tehnic.go.ro/ )// sketch door lock ver.4.1 (19.11.2013) use sketch door lock ver.2.0 (02.03.2013)
Dupa ce am primit un cadou deosebit, un "Arduino Starter Kit" de la prietenul meu Adrian Roman, caruia ii multumesc si pe aceasta cale, am ales sa fac probe cu servomotorul si, bineinteles, placa originala Arduino UNO R3...
Din primele teste am constatat ca servomotorul meu nu poate face cursa completa pana la 1800 am limitat miscarea intre 0..1700.
iar un sketch, care le combina pe cele doua, in care pinul D9 este pentru comanda:
/*Arduino Servo Test sketchhttp://www.hobbytronics.co.uk/arduino-tutorial2-servosand SWEEEP by BARRAGAN http://barraganstudio.comadapted by niq_ro from http://nicuflorica.blogspot.com*/
#include <Servo.h>
Servo servoMain; // Define our Servovoidsetup()
{
servoMain.attach(9); // servo on digital pin 9pinMode(13, OUTPUT); // initialize the digital pin no 13 as an output.
}
voidloop()
{
servoMain.write(45); // Turn Servo Left to 45 degreesdelay(1000); // Wait 1 second
servoMain.write(0); // Turn Servo Left to 0 degreesdelay(1000); // Wait 1 second
servoMain.write(90); // Turn Servo back to center position (90 degrees)digitalWrite(13, HIGH);
delay(4000); // Wait 1 seconddigitalWrite(13, LOW);
servoMain.write(135); // Turn Servo Right to 135 degreesdelay(1000); // Wait 1 second
servoMain.write(170); // Turn Servo Right to 170 degreesdelay(1000); // Wait 1 second
servoMain.write(90); // Turn Servo back to center position (90 degrees)delay(1000); // Wait 1 second // adapted part from SWEEP examplefor(int pos = 0; pos < 170; pos += 1) // goes from 0 degrees to 170 degrees
{ // in steps of 1 degree
servoMain.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position
}
delay(1000);
for(int pos = 170; pos>=1; pos-=1) // goes from 170 degrees to 0 degrees
{
servoMain.write(pos); // tell servo to go to position in variable 'pos' delay(15); // waits 15ms for the servo to reach the position
}
delay (1000);
}
Fata de articolul similar din iunie, numit Arduino de casa cu interfata USB PL2303HX, in care am prezentat un modul care nu are pinul DTR/RESET si la incarcarea unui sketch in Arduino trebuia sa tin apasat butonul RESET de pe placa, acum am sa prezint un modul care se bazeaza pe integratul CP2102 fabricat de Silicon Labs si are disponibil si pinul DTR/RST.
Modulul se numeste STE13-007 si e fabricat de o firma BAITE... din pacate nu am gasit poza exacta a acestuia, asa ca am facut unele cu telefonul (decat deloc mai bine ceva...)
Ulterior, am facut si cu un aparat foto serios:
Dupa instalarea driver-ului disponibil pe pagina fabricantului, cand se conecteaza interfata la calculator vor gasi pe portul 15 (in cazul meu) Silicon Labs CP210x USB to UART Bridge:
Modul de conectare la o placa Arduino de casa (sau una fara interfata USB) foarte simplu:
Ca sa nu se interpreteze gresit, eu am avut interfata USB cu integratul PL2303HX fara pinul de reset (RST/DTR), dar pe piata exista si cu... iar corespondenta din tabelul de mai sus este valabila pentru toate interfetele USB...
/* Blink Turns on an LED on for one second, then off for one second, repeatedly. This example code is in the public domain. sketch modified by niq_ro for testing a home-made Arduino
for more details see http://nicuflorica.blogspot.com/ Craiova, 11.2013
*/// Pin 13 has an LED connected on most Arduino boards.// give it a name:int led = 13;
// the setup routine runs once when you press reset:voidsetup() {
// initialize the digital pin as an output.pinMode(led, OUTPUT);
}
// the loop routine runs over and over again forever:voidloop() {
digitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)delay(100); // wait for 100msdigitalWrite(led, LOW); // turn the LED off by making the voltage LOWdelay(100); // wait for 100msdigitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)delay(100); // wait for 100msdigitalWrite(led, LOW); // turn the LED off by making the voltage LOWdelay(100); // wait for 100msdigitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)delay(100); // wait for a seconddigitalWrite(led, LOW); // turn the LED off by making the voltage LOWdelay(1000);
}
Fata de articolul precedent, in care am facut un sistem de acces cu cod, cu timp de acces pana se apasa o tasta sau temporizat, fara sau cu posibilitate de schimbare a parolei, acum o sa conectez si un afisaj LCD1602 (cu 16 coloane si 2 randuri). Deoarece pentru tastatura folosesc 7 intrari digitale (D1..D7), iar pentru LED-ul multicolor inca 3 (D9, D10, D11) + o iesire pentru electromagnet (D13), nu am suficiente iesiri digitale pentru afisajul LCD... imi trebuie 6... asa ca o sa folosesc cele 6 intrari analogice A0..A5 ca iesiri digitale D14..D19, dupa cum am gasit in cartea "30 Arduino Projects for the Evil Genius" scrisa de Simon Monk si in articolul How to add 6 extra pins to your Arduino with no extra hardware
Schema de conectare, din bucatele este:
O poza cu montajul:
Schema completa este:
Un sketch care are implementata si partea de afisare si acces functie de parola, iar inchiderea se face apasand tasta '#'. Schimbarea parolei se face cand zavorul este decuplat (acces permis) dupa apasarea tastei '*' (stocarea datelor se face in memoria interna EEPROM a microcontrolerului ATmega). LED-ul multicolor se aprinde in rosu, cand yala este incuiata, verde cand este descuiata si "palpaie" in albastru cand se apasa oricare tasta.
Am facut 2 filmulete in care sunt toate starile si prezint modul de functionare: