Dupa care am zis sa intorc informatia pe ecran sa fie mai usor de pus in picioare placa Arduino sau agatat in cablu, asa ca am modificat programul care este AUR4_RTC_NTC_clock3d.ino
Dupa cum am scris si in articolul anterior, daca ramane actualizarea la pornire si apoi la fiecare 12 ore, pot aparea abateri deranjante (de ordinul minutelor), asa ca modificati actualizarea la fiecare ora:
Dupa ce am achizitionat o placa Arduino Uno R4 Minima, si am modificat si testat un program simplu care face si aprindere intermitenta si aprindere/stingere lenta a ledului de la pinul D13 (Fade with flash on Uno R4)
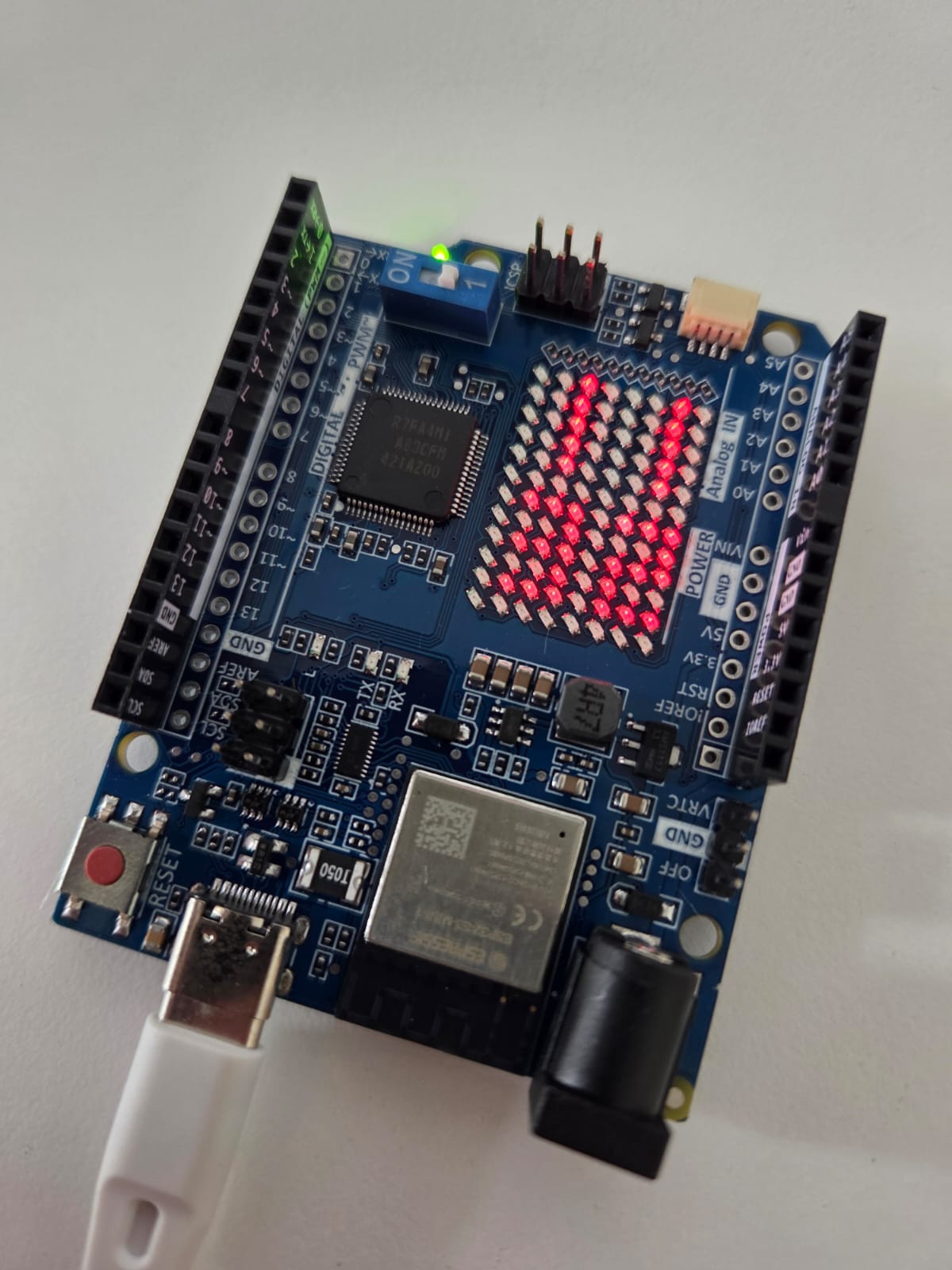
am realizat ca nu difera de placile Arduino cu care am mai lucrat, asa ca am achizitionat si o placa Arduino Uno R4 WiFi, si pentru ca are acea matrice de 12x8 leduri, cu care pot sa fac un "ceas".
Am gasit, la o cautare rapida, un ceas RTC (parte de RTC este inclusa in noul microcontroler Renesas, lipsind insa bateria, dar se poate conecta la pinii placii). Articolul se numeste Digital Clock with Arduino Uno Rev4 WiFi's RTC an LED Matrix
Am incarcat si eu programul disponibil in articol si am facut si eu niste filmulete:
Acest program este unul "demo" deoarece preia ora de la incarcarea programului, asa ca am trecut la un ceas RTC cu actualizare ora de pe server NTP, care se gaseste pe github.com/eremef/aur4_clock
doar ca este "static", asa ca am adaugat secunde animate si am rotunjit cifrele, programul modificat de mine este AUR4_RTC_NTP_clock2 si include 2 fisiere
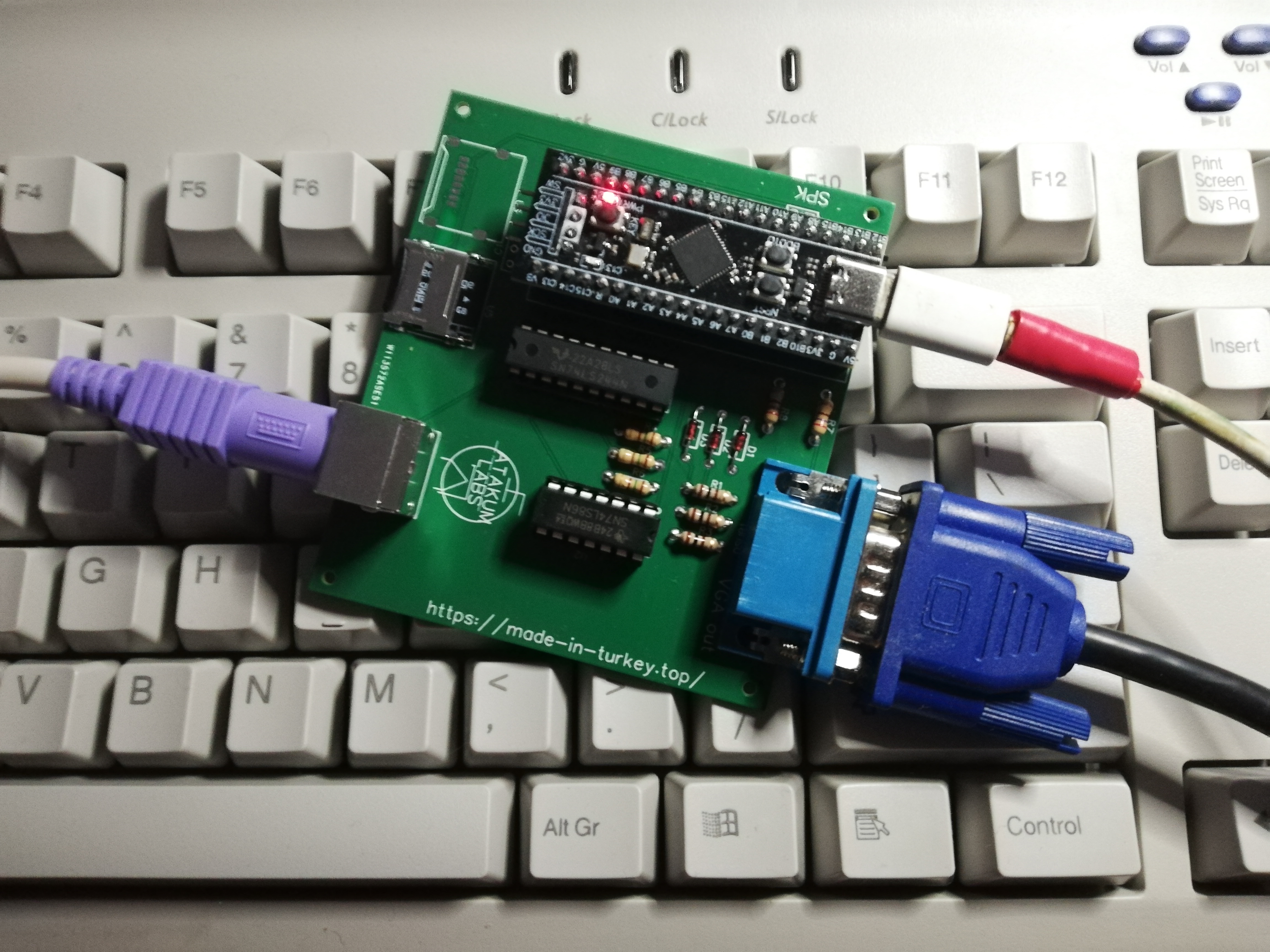
Am gasit un proiect interesant cu o placa de dezvoltare cu STM32F411 (sau STM32F401) si anume un emulator de calculator ZX Spectrum 48k. Proiectul original este prezentat in filmuletul Эмулятор ZX Spectrum c выходом VGA на STM32F401(411) si apartine lui Andrey Pastukhov.
am descoperit ca problema era din conectarea pinului 1 in loc de 3 de la cardul SD la pinul C13
si pentru a corecta, am taiat un traseu si am lipit un firicel (port-cardul din dreapta nu l-am montat, fiind dublarea celui din stanga).
Dupa discutii pe email cu Andrey Pastukhov, autorul proiectului si filmuletului de pe youtube, am dat de cap la partea de incarcare si salvare programe pe cardul SD, fiind necesar sa fie unul de maxim 8Gb si formatat FAT32 cu sectoare de 4096b (4kb). Altfel se salveaza doar programele proprii undeva in memoria interna a microcontrolerului STM32F411(401).
Dupa aceasta am copiat niste jocuri in format TAP de pe site-ul https://zxart.ee pot vedea jocurile, inclusiv programiorul salvat de mine QWW
Pentru incarcare programe (jocuri, utilitae, etc) se da comanda clasica LOAD "" si salvare cu SAVE "nume" ulterior mai trebuie scris un nume ce va apare ulterior pe meniul de incarcare si apoi se apasa simultan ENTER si SYMBOL SHIFT.
Au mai ramas mici probleme de afisare, la inceput si ulterior scrisul este verde, uneori cu verde combinat cu negru
si la meniu de incarcare/salvare sunt niste culori ciudate, dar Andrey mi-a sugerat sa verific partea incercuita si pe R8 sa-l inlocuiesc cu un semireglabil de 1kΩ.
17.04.2025
Nu a fost de acolo, ci o omisiune a unui traseu pe schema de la PCBway, traseul fiind chiar cel pentru culoarea verde, de la pinul A2 al placii cu STM32F4xx la pinul 6 (IN2) al integratului 74VHC244.
A fost conectat un firicel, pentru traseul lipsa
Un program modificat de Andrey special pentru a avea informatii scrise cu alb la initializare card (ca cel original afisa cu verde) se vedea anterior tot mov, iar dupa corectie alb:
apoi cum aparea textul de la la Sinclair si cum e acum
Meniul de incarcare programe, inainte si acum:
si jocul TOP GUN
Deci schema si cablajul de pe PCBWay are 2 erori, una la SD card si cealalta la partea de video (verde), am atentionat deja autorul materialului pentru a-l corecta.
Am masurat consumul total al emulatorului de ZX Spe48k si este foarte mic, la initializare si redare fisiere de pe card SD cam 67mA, apoi sub 50mA.
18.04.2025
Am mai facut 2 filmulete, ca functioneaza corect acum