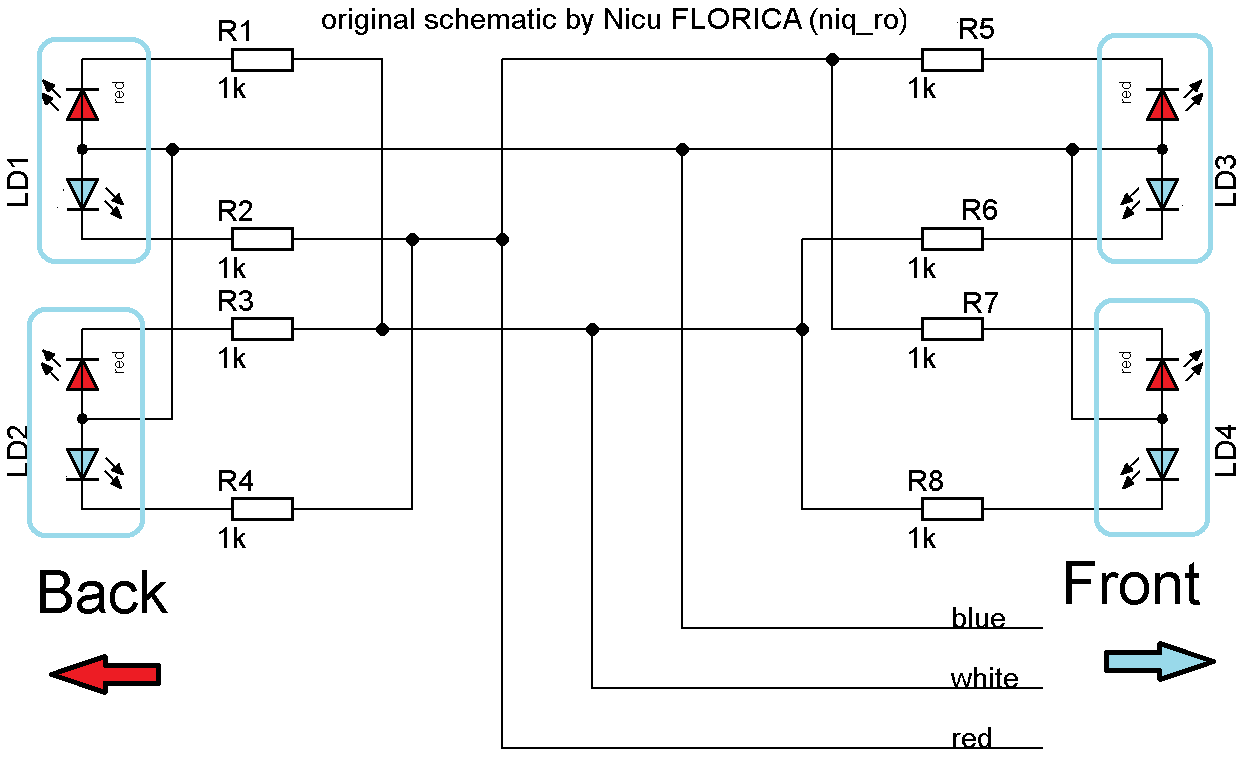
Pregatind o veche locomotiva analogica sa devina digitala, am adaugat acesteia un sistem cu 4 leduri bicolore (alb-rosu) cu anod comun si 8 rezistente pentru a avea 2 leduri aprinse in alb (in fata) si 2 aprinse in rosu (in spate) cand se face deplasarea in fata, respectiv 2 leduri aprinse in rosu (in fata) si 2 aprinse in alb (in spate), cand se face deplasarea in spate... lucrarea nu este finalizata, dar sistemul are 3 fire, unul albastru, pentru un plus comun, un fir alb pentru aprinderea luminilor corespunzatoare deplasarii in fata si unul rosu pentru aprinderea luminilor corespunzatoare deplasarii in spate. Acest sistem fost descris in articolul Transformarea unui locomotive analogice intr-una digitala (2).





Deoarece spatul liber, la locomotiva pe care o detin si vreau sa fac teste cu sistemul digital, este mic o sa imi fie greu sa testez si pentru una analogica, am zis sa vad daca sistemul se poate adapta si pentru sistemul analogic (si, bineinteles ca, merge).
Teste ca locomotiva digitala, la care ma refeream, am facut, cu o placa adaptoare si decodorul + leduri puse deasupra boghiului, dupa cum se vede in articolul Transformarea unui locomotive analogice intr-una digitala (1)

Revenind la sistemul de iluminare automat pentru o locomotiva analogica, fata de schema testata pentru sistemul digital

necesita doar 2 diode in plus

- simulare deplasare in fata



- simulre deplasare in spate



PS: Schema se poate simplifica, reducand numarul de rezistente la 4:

29.05.2021
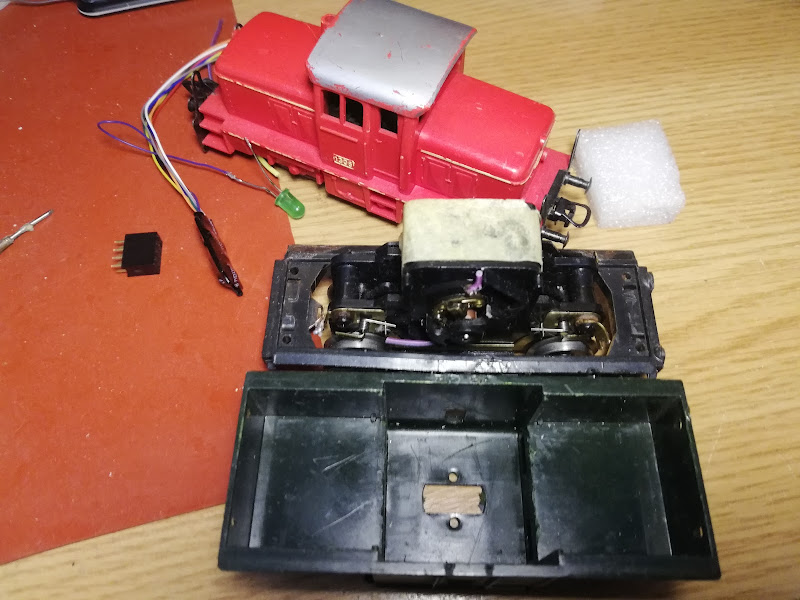
Noul coleg, Virgil, a recablat firele pentru sistemul cu 4 leduri bicolore cu anod comun si doar 4 rezistente in carcasa de locomotiva micuta: