
Dupa instalare, am, facut modificare pentru a deschide aplicatiile .py cu Python


verificand asta


Dupa ce am facut diverse teste cu exemplele de acolo, am adaptat unul si pentru a comanda modul de aprindere cu intermitenta a ledului de la pinul D13, sketch-ul actual fiind pyton_serial_control_flashes_1a1.ino

si dupa incarcare, vom modifica in programul Pyton com-ul folosit, in cazul de fata COM3.
Incarcam fisierul pyton_serial_control_flashes_1a1.py


si modificam daca calculatorul ne aloca alt port


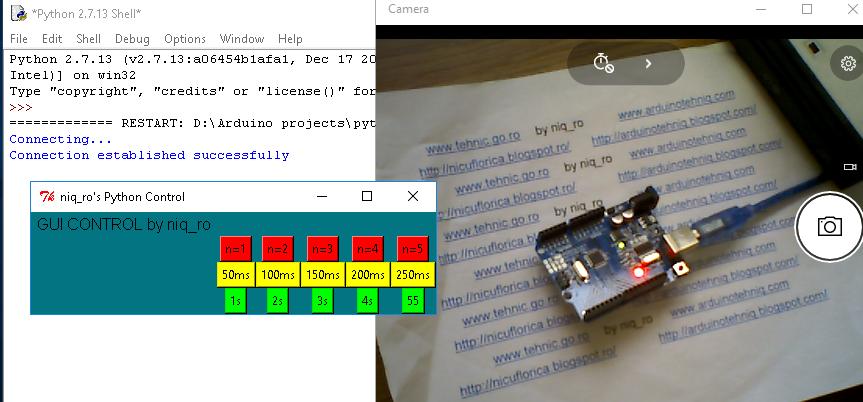
Acum pot controla modul de clipuire, de la o data la 5 ori, timpii de aprindere/stingere (50ms..250ms, in 5 trepte) si timpul de pauza intre "salve" de la 1 la 5 secunde (in 5 trepte), dupa cum se vede si in filmuletele:
- control Arduino cu interfata Python



Niciun comentariu:
Trimiteți un comentariu