In completarea sistemului prezentat anterior (primul articol si al doilea articol),

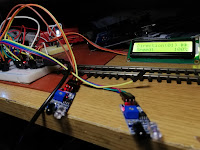
am pregatit o schema ce include un encoder si un afisaj conectat pe i2c (alfanumeric 1602/2004 sau unul grafic OLED). De asemeena, am conectat si partea a 2-a a driver-ului L298, pentru o ulterioara aplicatie.

Dupa incarcarea programului controlled_model_train_2b.ino, la alimentarea sistemului, ledul rosu (cel ce indica, de obicei, ca s-a activat senzorul de proximitate cu infrarosu corespunzator deplasarii) se aprinde periodic scurt (ca ledurile de la antenele GSM/TV, stroboscopic), iar sina de alimentare nu este alimentata. Pe afisaj apare mesajul STOP!.




Dupa ce se apasa butonul de pe encoder, pe ecran apare mesajul Pauza! si dupa cateva secunde (4 acum) incepe sa creasca viteza de la 40% pana la 100%. Este aprins ledul de directie, sa zicem DIR1 si ledul alb cel de PWM corespunzator vitezei.
Cand senzorul de la capatul de linie este activat se aprinde ledul rosu si apare pe acran mesajul "Frana!" si viteza incepe sa descreasca lent de al 100% la 40%, apoi brusc la 0%.
Apare, pe ecran, iar "pauza" de 4 minute si apoi se aprinde ledul DIR2 si cel de PWM, dupa ce locomotiva se deplaseaza si esteactivat celalalt senzor, viteza scade, locomotiva se opreste, asteapta un pic (4 secunde) apoi accelereaza si se deplaseaza spre capatul celalalt apoi se opreste cand este activat primul senzor, s.a.m.d.
Am facut 2 filmulete in care se vede modul de funtionare:
Deoarece partea utila a sinei de rulare este relativ scurta, am redus valoarea tensiunii de alimentare a puntii H cu L298 la 6,5V, astfel ca pe sina, la PWM maxim ajung 4,8V sau -4,8V (depinde de sensul de comanda), deci este o "pierdere" pe tranzistorii din puntea H de 1,7V.
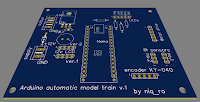
Am pregatit o versiune de cablaj pentru a elimina breadboardul si conexiunile proaste
Am adaptat si versiunea cu indicatii in engleza (de fapt se poate selecta limba: 0 - engleza si 1 - romana), programul fiind controlled_model_train_2d.ino


Niciun comentariu:
Trimiteți un comentariu